Five Axis Robotic Arm
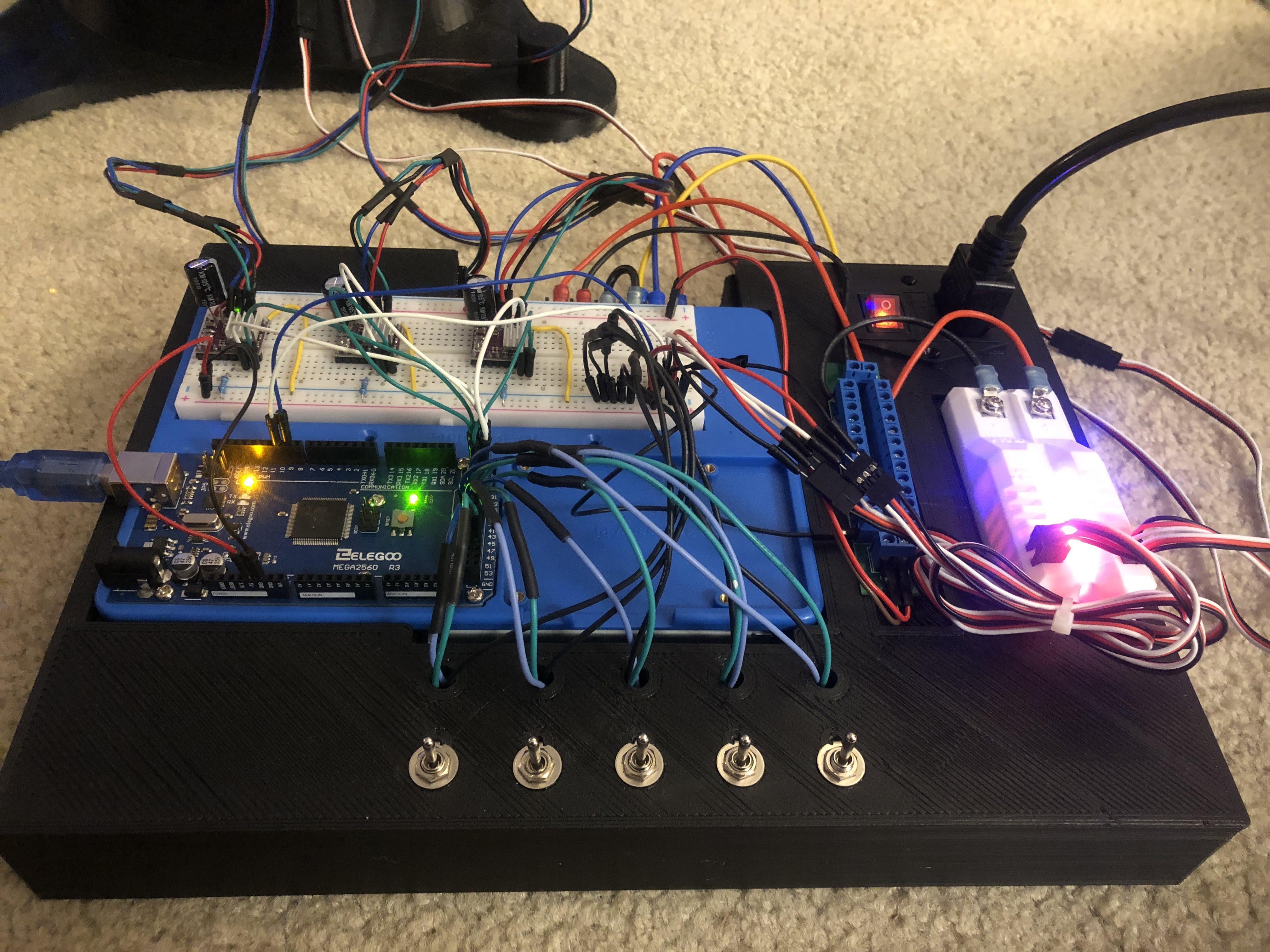
During the fall semester of the 2020 school year, I decided to start building a five-axis robotic arm. The inspiration for the arm came from the robotic arms that are used in film productions that carry cameras to capture really cool cinematic shots. This arm was designed with that purpose in mind at a smaller scale to hopefully one day carry a GoPro camera. I designed the arm in the Computer Aided Design program Onshape, and 3D printed all the structural joints out of PLA. The base of the arm is large and flat to increase stability and has pegs to add weight to the base if needed. The base houses a “Lazy-Susan” style bearing is powered by a NEMA 17 stepper motor to create the turret joint. The next joint is directly driven by a NEMA 17 stepper motor. The middle joint of the arm is driven by NEMA 17 powered linear screw drive. This enables the motor to be placed low to the ground, reducing the torque on the other joints. The final two joints at the end of the arm are created by high torque servo motors. The system is powered by an external 12-volt power supply. An Arduino Mega controls the arm, sending step and direction commands to each of the motor controllers, and position commands to the servos. The servo’s power is boosted by a servo power module from REV Robotics because the Arduino cannot output the required current. Each joint is controlled by triple-throw temporary switches that command an individual motor to move in a specified direction.
I created this arm as part of a project for my circuits class at the University of Tennessee; however, I intend to continue working on it. Moving forward, I need to replace the main drive shaft with a keyed shaft to increase available torque to the joint, as the shaft collar set screws currently slip on the shaft when the arm is fully extended. Once that problem is fixed, I will work on improving the code to improve smooth movement and develop more autonomy.
Gallery