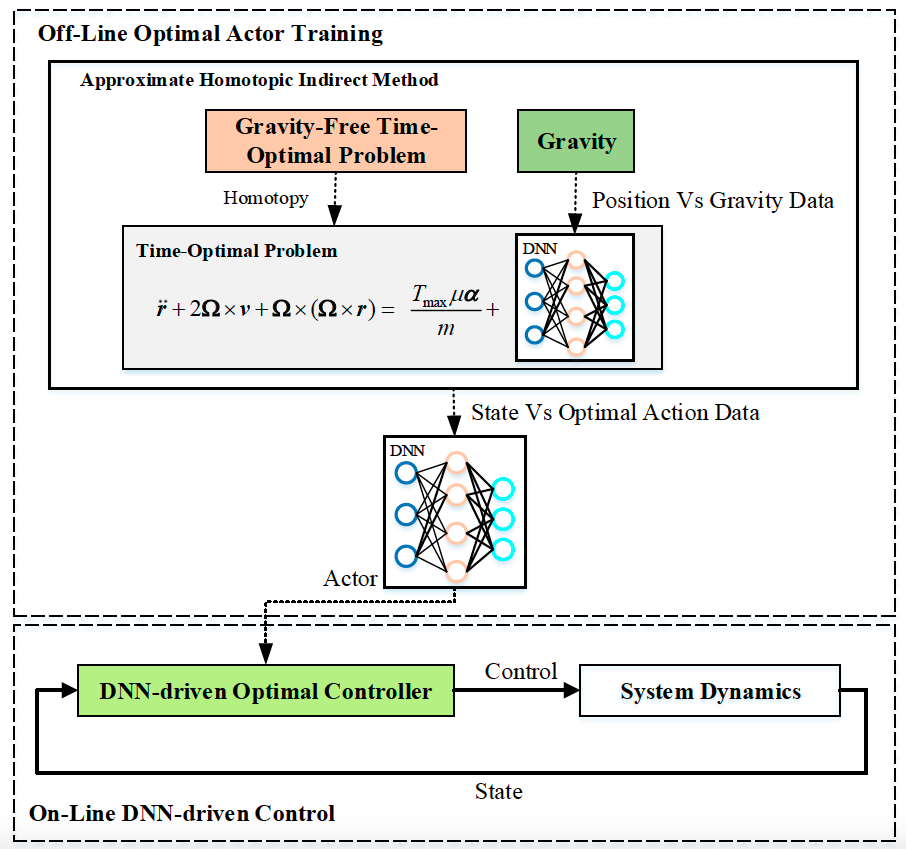
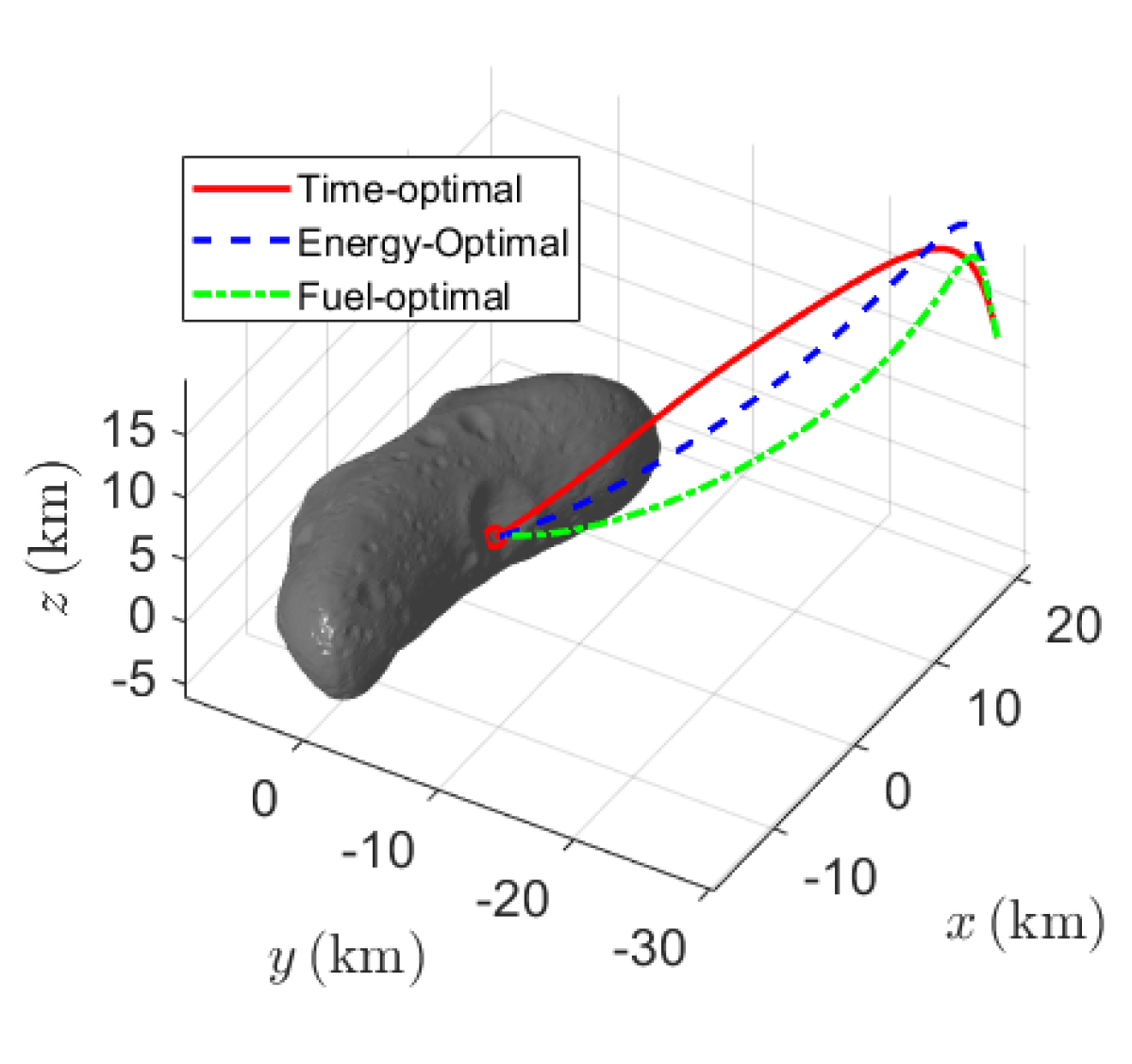
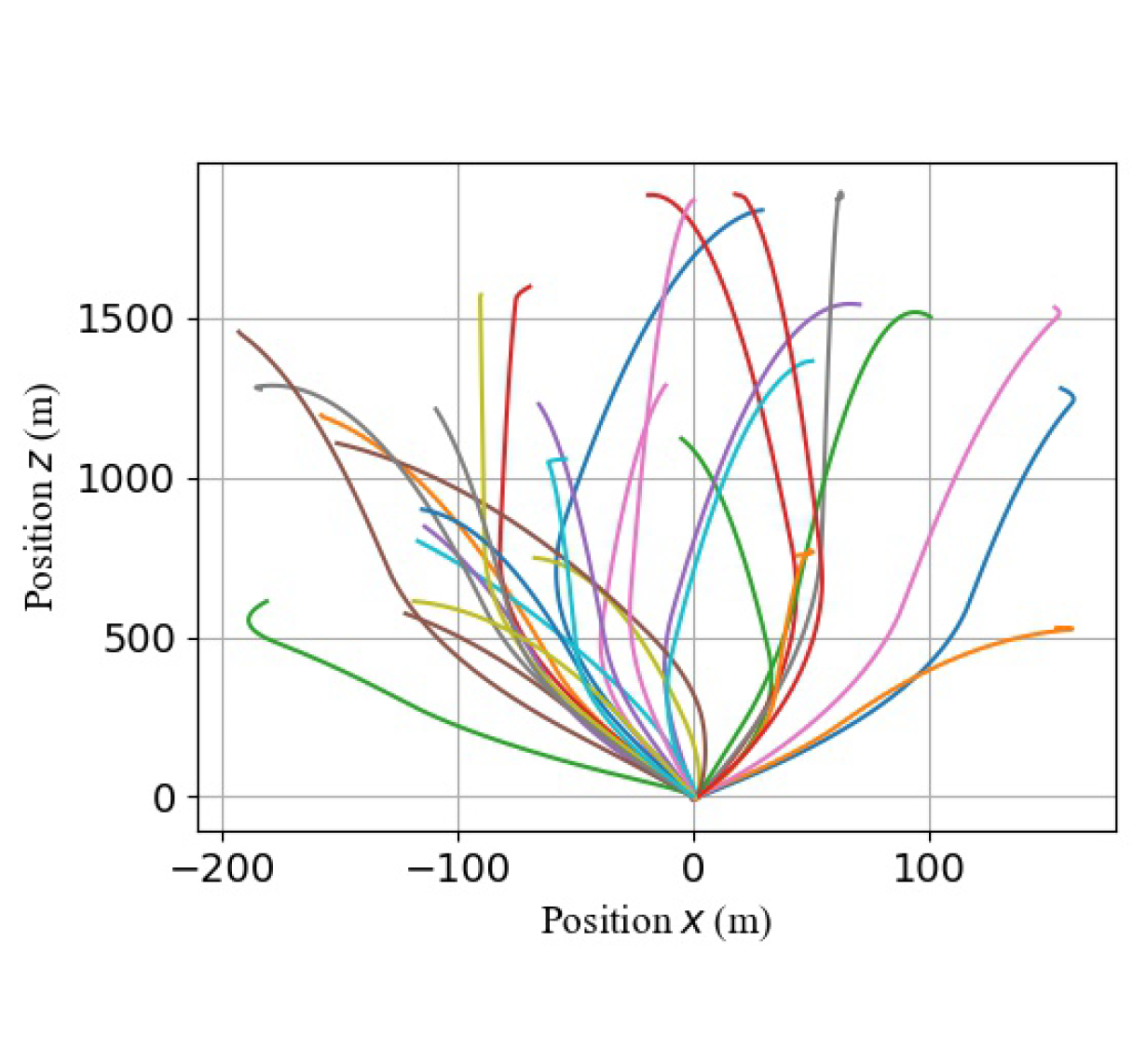
Real-time, high-precision landing control techniques are of key importance to a lot of planetary and asteroid missions. In our lab, data-driven machine learning approaches are developed to improve the autonomy and intelligence of the landing process. First, we propose a real-time optimal control approach using deep neural networks (DNNs) to achieve precise and robust soft landings on asteroids with irregular gravitational fields. To reduce the time consumption of gravity calculation, DNNs are used to approximate the irregular gravitational field based on the samples generated by a polyhedral method. An approximate indirect method is applied to solve the optimal landing problem and generate state-action samples by using the trained DNN-based gravitational model and a homotopic technique. Then, DNNs are designed to learn the functional relationship between the state and optimal actions obtained by the approximate indirect method. The resulting DNN-based landing controller can generate the optimal control instructions according to the flight state and achieve real-time optimal control for asteroid landings. Time-optimal, fuel-optimal, and energy-optimal asteroid landing problems are successfully solved. In addition, fuel-optimal Moon landing control problem is addressed using an interactive deep reinforcement learning algorithm. These developed methods are stable, fast, and robust for onboard implementation.