Research Overview
We are interested in two main topics:
- real-time numerical algorithms: an advanced vehicle system should be able to respond to the latest mission requirements in real-time and operate autonomously in highly dynamic environments; and
- reliable and accurate solution process: an autonomous vehicle system is expected to perform complex missions incorporating highly nonlinear dynamic systems and many constraints with a high degree of reliability.
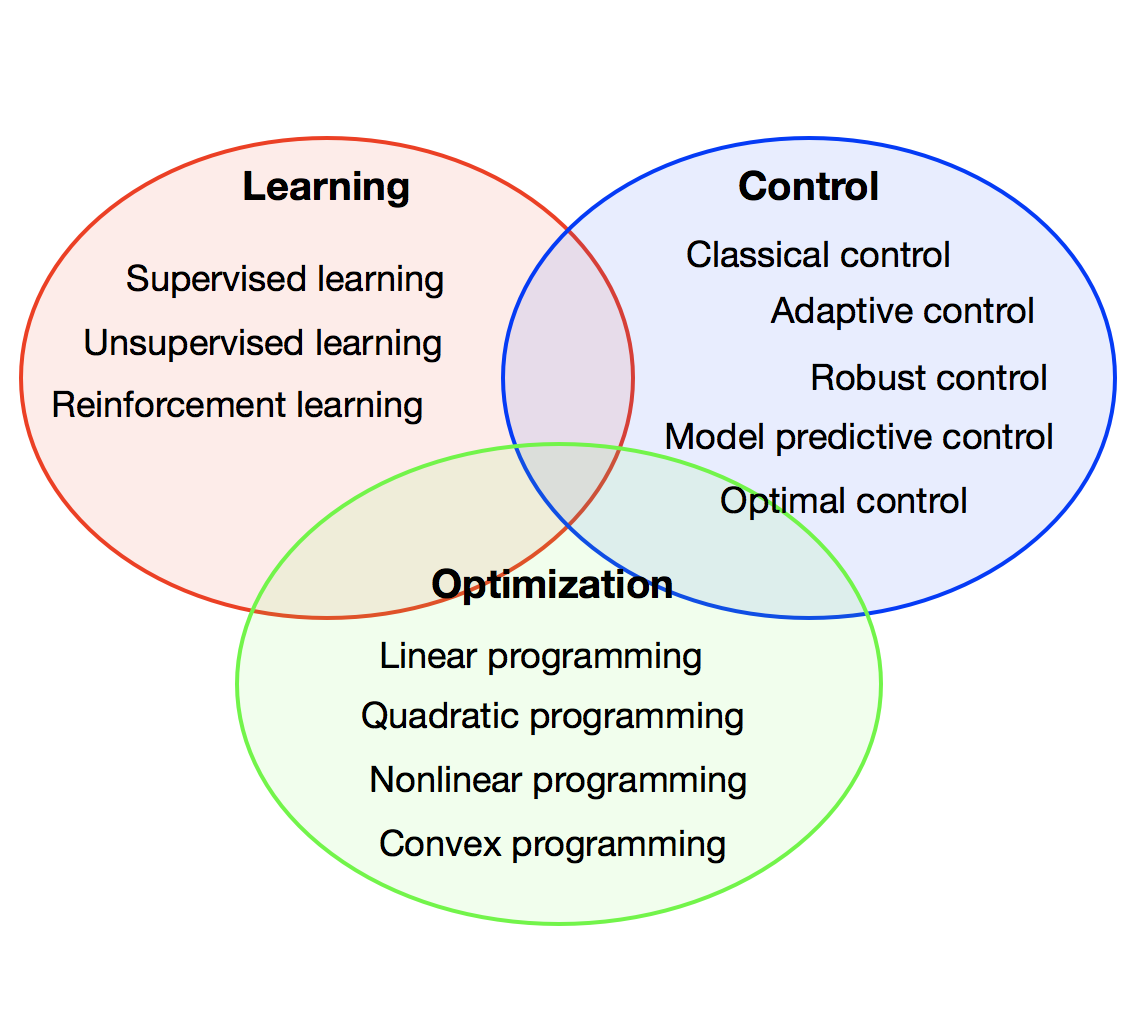
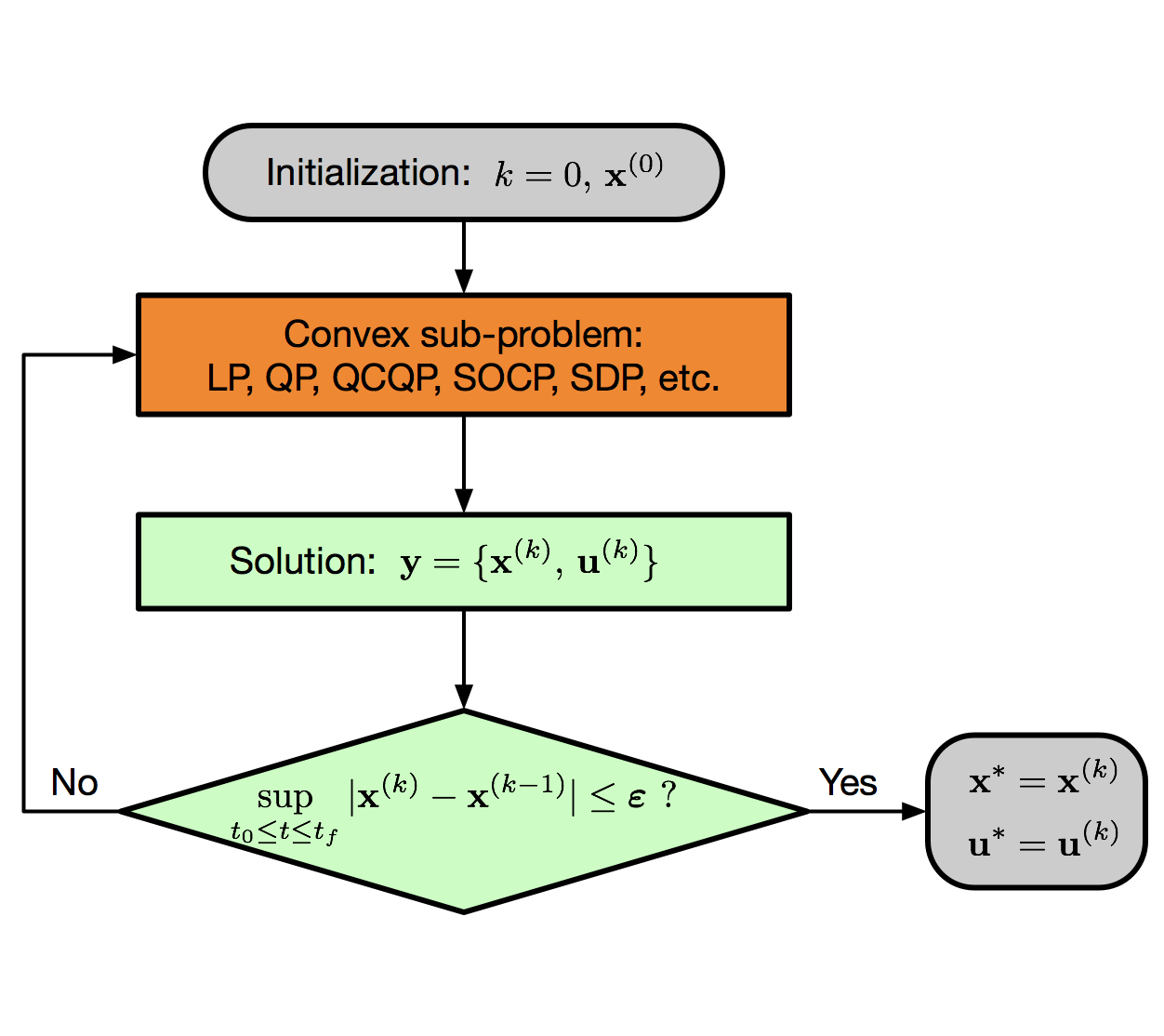
To achieve these goals, we develop a set of convex and successive convex optimization approaches, which can be applied to deal with a range of control and optimization problems. By taking advantage of convex optimization and highly efficient interior point methods, these approaches allow complicated guidance and control problems to be solved in real time and offer great potential for onboard application. With the significant increase in computational efficiency, the convex optimization-based methods are expected to become a fundamental technique for system autonomy and autonomous operations. Our current efforts focus on improving the reliability and computational efficiency of these solution methods for wider implementation.
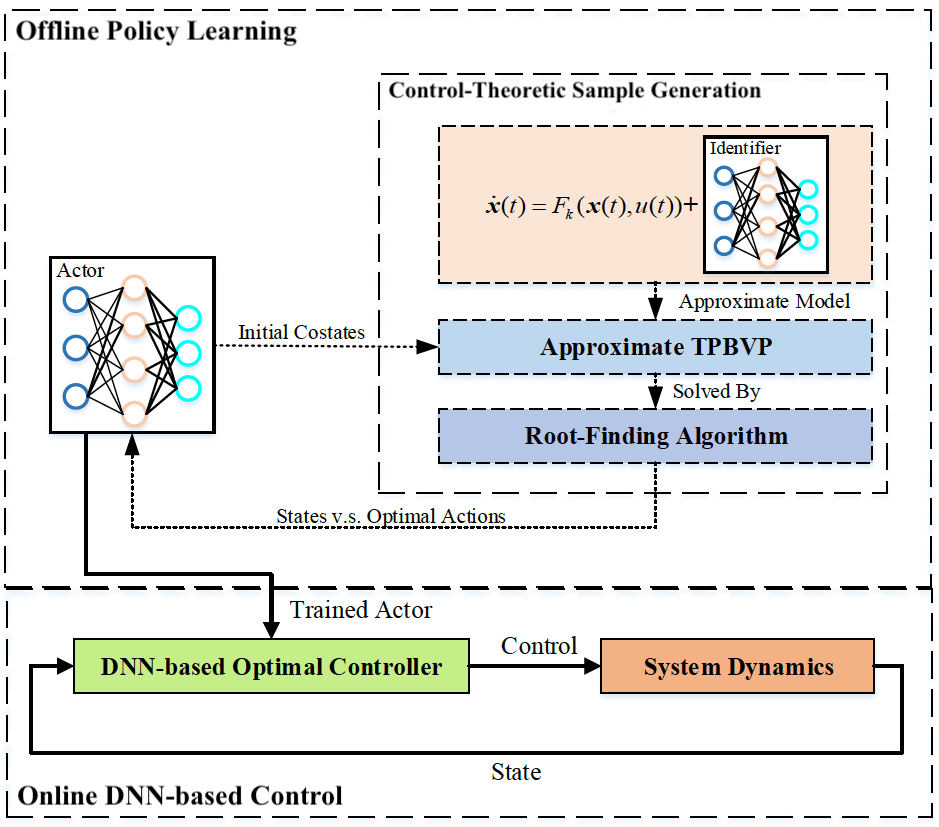
In addition, the development of computational resources and the latest advances of artificial intelligence offer great opportunities to solve optimal control problems in real time using machine learning techniques. Theoretical advances in solving both the Hamilton-Jacobi-Bellman equations and the two-point boundary value problem (TPBVP) show possible uses of deep neural networks (DNNs) for real-time optimal control of both deterministic and uncertain nonlinear dynamical systems. These state-of-the-art techniques allow us to develop innovative data-driven approaches to reduce the computational burden, avoid catastrophic solution failure, increase adaptability to large-scale data sources, and result in faster and steadier convergence to optimal solutions.
Currently, we are addressing a wide range of applications including:
- Connected & automated vehicles and traffic networks
- Advanced air vehicles
- Spacecraft orbit transfers
- Planetary/asteroid landings
- Atmospheric entry
Sponsors