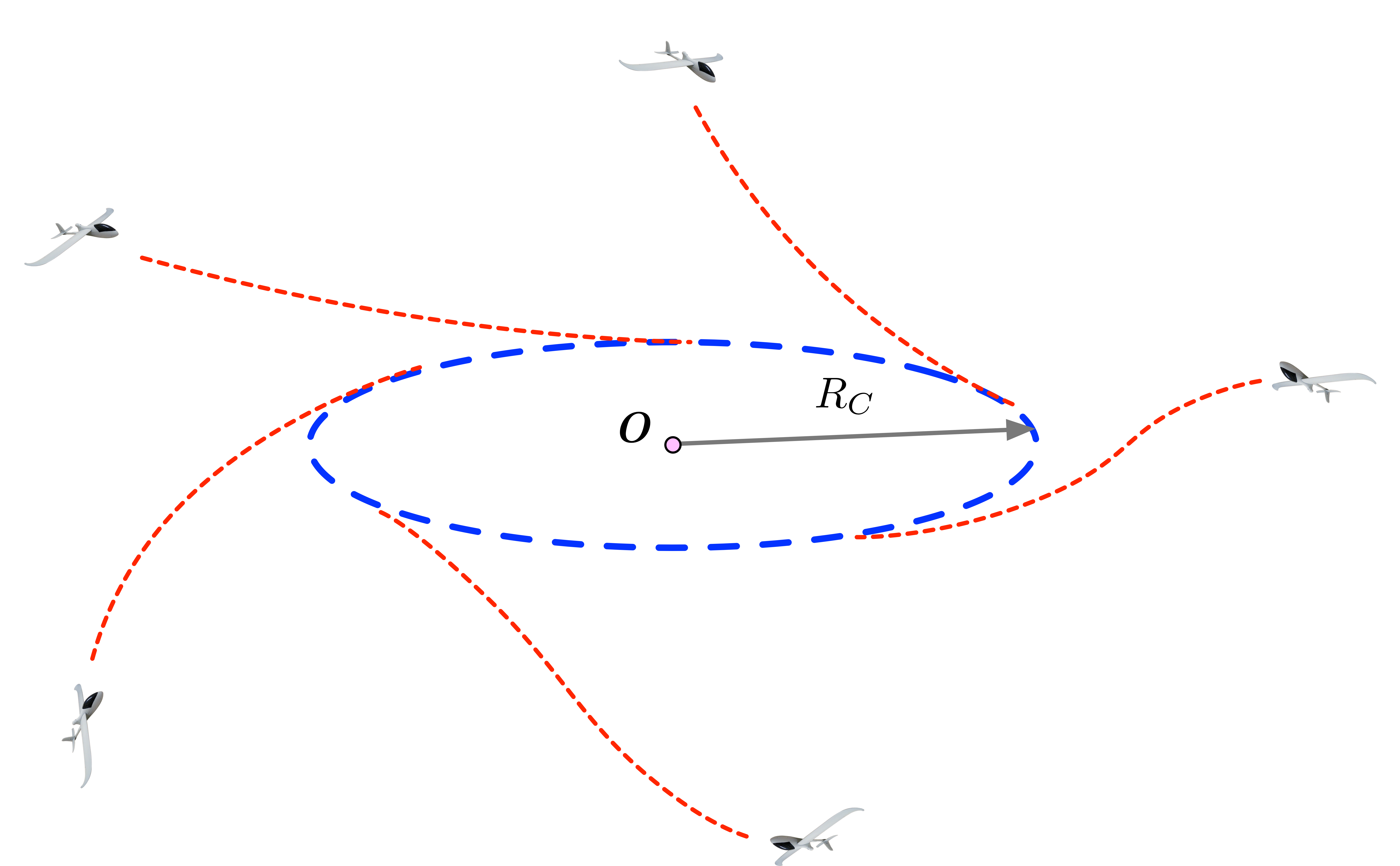
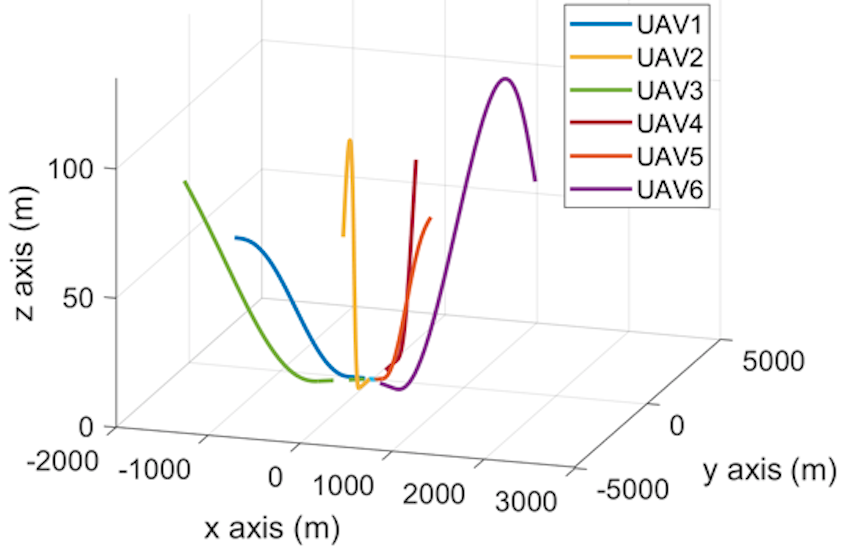
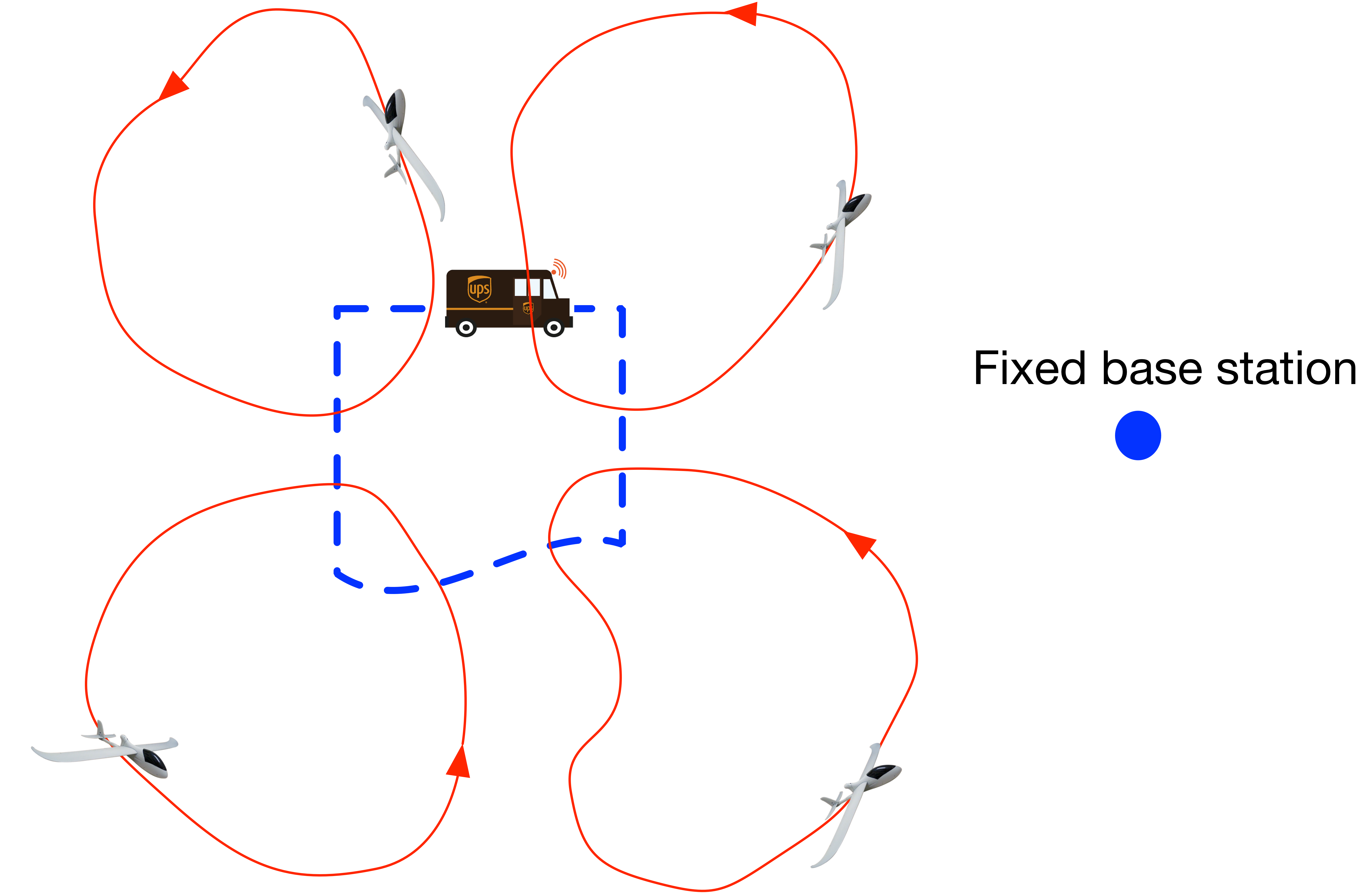
Unmanned aerial vehicles (UAVs) are playing essential roles in both military and civilian applications for mapping, surveillance, exploration, target tracking, and rescue operations. To perform these missions, advanced technologies are required to better enable autonomous operations and control of the vehicles. Following this need, we are exploring highly efficient convex optimization methods and machine learning techniques with applications for both single-vehicle and collaborative multi-vehicle missions. For example, considering the broad field of view and rapid coverage of large search areas offered by UAVs and the accurate location control of unmanned ground vehicles (UGVs), the complementary capabilities of aerial and ground vehicles are exploited. We are developing two real-time optimization approaches to enhancing UAV-UGV cooperation for different mission scenarios. One is to generate three-dimensional trajectories for UAVs to rendezvous into an aerial orbit. The other one is to rendezvous with moving UGV platforms. The developed methods have potentially wide applications for surveillance, navigation, path planning, target detection, aerial refueling, and package delivery.